题目:基于PWM调速的直流无刷电机转速实时测量及控制模块设计
摘要:长期以来,直流无刷电机以其良好的线性特性、优异的控制性能等特点成为大多数变速运动控制和闭环位置伺服控制系统的最佳选择。特别随着计算机在控制领域,高开关频率、全控型第二代电力半导体器件(GTR、GTO、MOSFET、IGBT等)的发展,以及脉宽调制(PWM)直流调速技术的应用,直流无刷电机得到广泛应用。
关键词:直流无刷电机;PWM调速;控制系统
1.直流无刷电机及其工作方式介绍
1.1直流无刷电机简介
直流无刷电动机可以看作是一台用电子换相装置取代机械换相的直流电动机,如图1所示,永磁直流无刷电动机主要由永磁电动机本体,转子位置传感器和电子换向电路组成。[1]无论从结构或控制方式上来看,直流无刷电动机与传统的直流电机都有很多相似之处:用装有永磁体的转子取代有刷直流电动机的定子磁极,用具有多相绕组的定子取代电枢,用由固态逆变器和轴位置检测器组成的电子换向器取代机械换向器和电刷。[2] [3]
图1 直流无刷电机的结构
1.2直流无刷电机工作方式
无刷直流电机的控制系统如图2所示,主要由无刷直流电机、整流器、逆变器、位置传感器和控制器几部分组成,采用“三相六拍-1200方波型”驱动。[4]
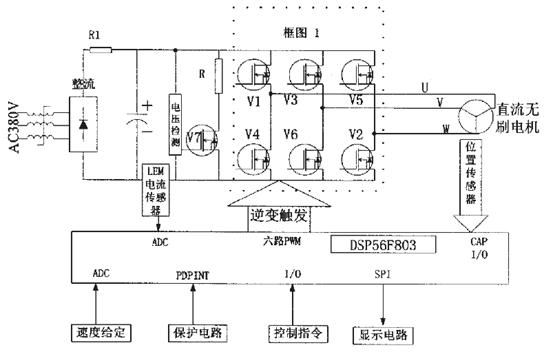
图2 直流无刷电机控制器原理图
无刷直流电动机的工作是通过逆变器功率管按一定的规律导通关断,使电机定子电枢产生按600电角度不断前进的磁势,带动电机转子旋转来实现的。分析如下:图3 (a)是理想条件下对应的电枢各相反电势和电流;每个功率管导通1200电角度,互差600电角度,当功率管V3和V4导通时,电机的V相和-U(取电流流进绕组为正向)相通电(如图1)。定子电枢合成磁势为图3 (b)中所示的Fa4;若功率管V3关断,而功率管V5导通,此时电机的W相和-U相通电,电枢合成磁势变为Fa5, Fa5比Fa4顺时针前进了600电角度。由此可知,定子电枢产生的磁势将随着功率管有规律的不断导通关断,按600电角度不断地顺时针转动。逆变器功率管共有六种触发组合状态,每种触发组合状态只有与确定的转子位置或反电势波形形相对应,才能产生最大的平均电磁转矩。两个磁势向量当其夹角为900时,相互作用力最大。而电子电枢产生的磁势是以600电角度在前进,因此在每种触发模式下,转子磁势与定子磁势的夹角在1200到600之间变化才能产生最大的平均电磁转矩。见图3(a),假如在ti时刻,转子的磁势Fj处于线圈UX平面内,而且要使转子顺时针旋转;此时应该导通功率管V5和V4,使定子的合成磁势为Fa5与凡的夹角成1200转子在Fa5与Fj相互作用产生的电磁转矩的作用下顺时针旋转,到t3时刻,Fa5与Fj的夹角成600,此时关断功率管V4,导通功率管V6,定子合成磁势为Fa6,与Fj的夹角成1200,两者产生的电磁转矩使转子进一步旋转。[5]
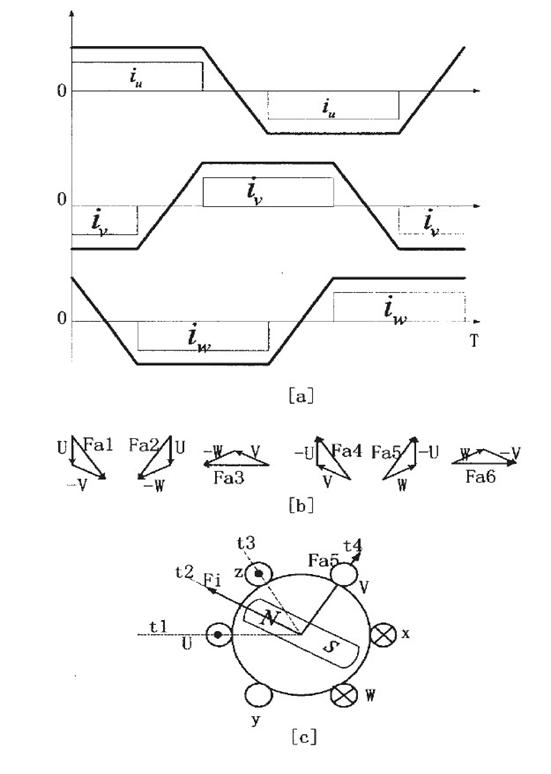
图3 无刷直流电机的工作原理
与一般直流电动机一样,永磁无刷直流电动机的运行可分为四种情况,即正转电动、反转电动、正转制动和反转制动。逆变功率管的六个导通组合状态产生六个定子磁势,每个相差60-(以一对极为例),如图3所示,转子位置分为六个区间。当电机正转(顺时针)电动时,以产生最大的正的平均电磁转矩为原则,定子电枢合成磁势Fa应当顺时针超前转子磁势Fj1200到600,即当Fj于区间4时,定子磁势应为Fa4,导通功率管V3和V4, 当Fj处于区间5时,定子磁势应为Fa5,导通功率管V4和V5。
当电机正转制动时,则以产生最大的负的平均转矩为原则,定子电枢合成磁势Fa应当顺时针滞后转子磁势Fj1200到600,当Fj处于区间2时,定子磁势为Fa,导通管V4和V5,当Fj处于区间3时,定子磁势为Fa,导通管V4和V3。
同理 ,当电机反转电动时,定子电枢合成Fa反时针超前转子磁势Fj1200到600,当电机反转制动时,定子电枢合成磁势Fa反时针滞后转子磁势1200到600。[6][7]
为了实现系统宽范围调速,动态响应快,无刷直流电机通常采用定频调宽的PWM调速方法。
对于其功率逆变器为桥式电路结构的三相无刷直流电动机而言,PWM信号实现调压调速的调制方式有两种:半桥调制和全桥调制。对功率逆变桥的所有开关元件T1~T6进行脉宽调制,即“全桥调制”.在任意时刻,只对功率逆变桥的上半桥T1,T 3,T5(或下半桥T2,T4,T5)进行脉宽调制,即“半桥调制”。对于半桥调制,又分为“对称半桥调制”和“不对称半桥调制”。对称半桥调制是指将每一个功率管的开关状态分为两个不同阶段,前600保持全通(或调制),后600进行调制(或全通),即上下桥臂对称调制。不对称半桥调制是指在1200区间内要么只对上半桥调制,要么只对下半桥调制。对于永磁方波无刷直流电动机而言,其理想的反电势、相电流波形如图4所示c图4中的eA,eB,eC波形分别为电机三相绕组的反电势,iA,iB,iC分别为三相绕组的电流。[8]
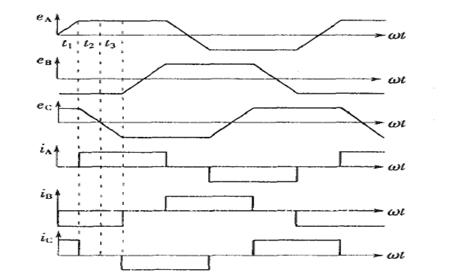
图4 无刷直流电机电势,电流波形
不同的调制方式对电枢电流的影响是不同的,进而对转矩的影响也不同。下面分别对半桥调制和全桥调制这两种PWM调制方式进行分析。
在不对称半桥调制时,以T1,T6导通的600(电角度)时间为例,此时A,B 两相为导通相,C相为截止相,eA,eB,eC波形见图4的t1~t3。电机运行时,设E为相反电势幅值,E<Ud/2.假设T1接受导通信号,T6接受PWM信号。在这段时间中,eC从+E变到-E。当T1导通时,电流从电源经T1、电机A,B 相及T6形成回路,此时三相中点0的电位U0=Ud/2;T6截止时,电流经T1,A相,B相及二极管D3续流形成回路,在T6截止且续流电流并未衰减到零时,三相中点0的电位U0=Ud,设Uc为C相端电压,这时:Uc = Uo + ec = Ud + eC > Ud,所以T5的反并联二极管D5正偏,从而导致C相导通,这就是非换向期间的截止相导通现象。同理,设T6接受导通信号,T1接受PWM信号,经过分析可知,当T1截止时,Uc<0,二极管D2正偏,C相仍然会导通.由于电机运行当中,截止相也续流导通,导致电机此时处于三相同时导通状态,这将引起电机电枢绕组内电流发生较大的波动。无论是不对称半桥调制还是对称半桥调制,PWM信号只对导通周期内的一对元件的一个起作用,所以不对称半桥调制方式和对称半桥调制方式在t1~t3时间内对截止相的影响作用其实是相同的.也就是说,在对称半桥调制时仍然会出现截止相续流导通的现象。但是由于对称半桥调制时上下桥臂的调制是对称的,电压和电流对称,所以电流比不对称半桥调制时要小。[9] [10]
全桥调制时,仍以t1~t3时间为例,PWM信号对T1及T6都起作用。T1,T6导通时的电流与半桥调制时相同,此时,中点0的电位Ua= Ud/2;当T1,T6同时截止时,电机A,B 两相的电流通过D4,D3 及电容构成回路,中点0的电位仍然有Uo = Ud/2。所以C相端电压在Ud/2+E到Ud/2-E间变化,即600电角度内,都有0<Uc< Ud,所以D2与D5均处于反偏状态,从而C相不会导通.也就是说全桥调制时不存在非换向期间的截止相导通现象。同时由于在电机运行期间,中点0的电位不会发生变化,所以电流波动较小。[11]- [14]
通过以上对电路的分析可知,如要避免截止相导通,就必须使截止相的端电压不要超过直流母线电压,也不要低于零电压这样,连接在该相上的上下桥臂二极管均不会正向导通,从而杜绝了续流电流的产生。
由于半桥调制存在截止相导通的问题,致使电机截止相电流的正负半波不对称,产生附加电流,又因为它与相电势反相,故产生负转矩,导致了转矩脉动增大,削弱了电机合成转矩,降低了电机的效率。全桥调制时,电机始终只有两相导通,截止相不会产生续流,并且电机中性点电压在电机运行期间始终不会改变,电流波动小。但全桥调制下开关管的开关频率远远高于半桥调制下开关管的开关次数,因而损耗较大,这在一定程度上限制了它的应用。[15]截止相导通现象是半桥调制下必然存在的问题,在调制方式不改变的情况下,这种现象无法消除。全桥调制虽然不会出现截止相导通的现象,但这种调制方式所带来的开关损耗问题也必须引起重视。为了同时解决这两个问题,近年来学者提出了许多新的PWM调制方式,其中300调制方式是一个热点。300调制又被称为“PWM_ ON _ PWM” 调制,就是每只开关管在开通前300和后300期间进行PWM调制,中间600区间保持恒通。实际上,300调制的工作原理就是,在截止相反电势大于零时,上桥臂斩波,下桥臂全通;反电势小于零时,下桥臂斩波,上桥臂全通,这样就使截止相的端电压不会超过直流母线电压,也不会低于零电压,从而不会产生截止相导通的现象。300调制既完全消除了截止相导通的现象,又降低了开关损耗,是综合了全桥调制和半桥调制两者优点的一种调制方式。[16]
300调制也带来了新问题,因为常规的三相无刷直流电机安装了三路位置传感器,每路位置传感器输出正负交替的方波信号,正方波和负方波各持续1800电角度,三路位置传感器的输出信号互差1200电角度。通过检测三路位置传感器输出的逻辑组合信号,对各个开关管进行开关控制,使三相电枢绕组在任意时刻有两相通电,从而获得连续的跳跃式定子磁场,定转子磁场相互作用产生电磁转矩,使电机旋转。无刷直流电机每隔600电角度,三路位置传感器输出信号的逻辑组合才变化一次。而要实现300调制,就必须使位置传感器输出信号的逻辑组合每300电角度就变化一次,这样才能在1200电角度区间内实现“PWM_ON_PWM”调制。所以,在300调制时需要再加装三路位置传感器,才能满足控制要求。在这种情况下,电动机系统就会变得复杂,同时也增加了成本。[17]
3.无刷直流电机测速方法的研究
在一般的电动机调速系统中,通常在电动机的转轴上安装测速发电机或光电编码盘等测速装置。直流测速发电机是应用时间已久、应用范围较广的一类测速元件,它的主要优点是灵敏度高,线性误差小,受温度变化的影响较小,但由于它具有电刷和换向接触装置,因而存在一些难以从根本上克服的缺陷,如可靠性较差,常需维修等,使得使用环境受限制;普通光电编码器虽然检测精度较高,但体积大,成本高。
中、小型的无刷直流电机常常利用转子位置传感器所产生的脉冲信号来反映它的转速。通常所用的位置传感器有霍尔传感器和光电式传感器。霍尔传感器具有结构简单紧凑、灵敏度高,传送过程无抖动现象,频率响应宽、寿命长等优点。但它存在一定程度的磁不敏感区,会降低电机运行的可靠性,且对安装位置要求精确,因此安装调试比较复杂,如要用于产品开发,会间接增加开发成本。光电式传感器是利用光电元件,对带有槽口(或栅)的旋转圆盘的位置进行通断变化,产生一系列反映转子位置的脉冲信号。其检测分辨率高,适用于检测高速运转的同步电动机。这种传感器性能比较稳定,这在实际应用中是相当重要的。但它也有自身的缺点,输出信号噪声比较大、光源灯泡寿命短、使用环境要求高。不过对于一般的工业应用中的无刷直流电动机来说,环境等因素影响并不大,而其他的缺陷只要采用新型光电元件是可以克服的。
以Agilent公司的HEDS-9700系列为例,介绍这类器件及其工作原理。该系列是一种高性能、低成本、光学增量式编码器模块口。当与一个光码盘协同工作时,可以输出二路相位差90。的方波信号,可检测出旋转或线性位置。模块由一个有透镜的LED源和检测集成电路(附在很小的C形塑料封装上)组成。由于采用平行光束和独特的光检测阵列,对安装精度的要求不高。
在该方法中,HEDS-9700产生的信号,通过80C196MC单片机处理来测得电机的速度。下面以360线的光码盘为例来说明。电机旋转一圈能产生360个2路正交的脉冲信号,如图1中的脉冲A和B所示,然后通过80C196MC中定时器T1的90。相移式计数方式,能够一圈计数1440次,相当于每次计数为0.250。检测器脉冲逻辑示意图如图5所示。由HEDS-9700产生的A、B2组脉冲信号的频率相同,频率的快慢和电动机转速成正比。2组脉冲的前沿到达时刻不同,可用来判断电动机的正反转方向。如电动机正转,在脉冲信号A出现上升器时,脉冲信号B为低电平;若电动机反转,当脉冲信号A出现上升沿时,脉冲信号B为高电平,由于80C196MC设有专门的2个正交信号A和B输人口,在芯片内部有一个计数器TIMERl,按照脉冲imp来计数,当电机正转时,计数器向上计数,当电机反转时,计数器向下计数,这样就大大减少了硬件电路。
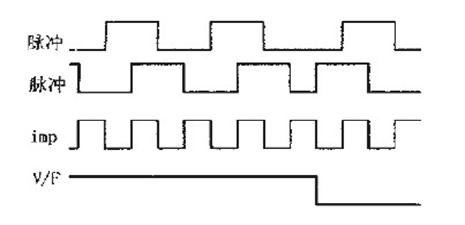
图5 检测器脉冲逻辑示意图
用于直流无刷电动机控制时,信号和速度检测电路原理图如图6所示。图中的P1~P5是单片机的I/O输入口,其中送到P3,P4,P5口的是用于电机换相的3个光电管产生的电机位置信号,P1和P2就是H9700产生的2路正交信号。由图可见,与传统电路相比,该电路相当简单实用,且大大简化了硬件电路,大大降低了成本。
也可以用分立元件来替代HEDS-9700系列,采用1个发光二极管和1个有2个接收器的接收管来实现速度的检测。由于发光管和接收管之间挡板的移动,2个接收器接收到的信号会有时间差。然后2个信号通过74HCl74整形成方波,经过适当调节,使信号实现正交。这类装置相对于HEDS-9700系列产品的成本更低廉。该电路的原理图见图7。图中的接收管由2个接收二极管代替,整个电路可替代图6中H9700的电路。[18]
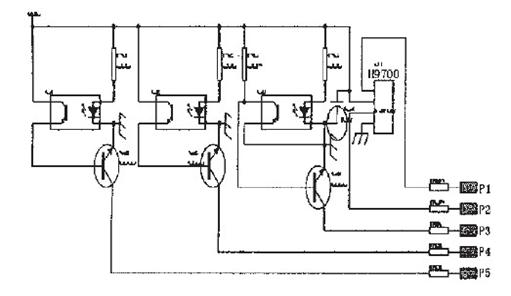
图6 位置速度检测电路
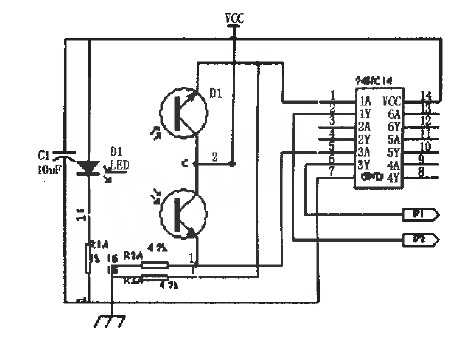
图7 速度检测电路
4.简要评价及问题
1. 了解了无刷直流电机的构造以及它的工作原理,深入了解了无刷直流电机全桥调制和半桥调制这两种常规PWM调制方式,并简要对近年来出现的300调制方式有了一定的认识。
2. 了解了各种调制方式的特点以及其存在的优缺点,通过对各种PWM调节方式的比较,得出了“PWM_ ON _ PWM” 调制方式较好的结论。
3. 应当解决的问题:
(1) 如何在不增加电机系统复杂性的前提下,实现“PWM_ ON _ PWM” 调制方式,进一步提高电机调速的性能。
(2) 研究如何减小直流无刷电机的转矩脉动的方法
无刷直流电机得到越来越广泛的运用,但上述问题仍然困扰着大家,有待于大家进一步的探讨。
参考文献:
[1] John H. Boyd, Gerald,Duncan; Michael Thomas George,Perry;Brushless DC Motor Control;United States Patent;1998
[2] V. Balarama Murty;Brushless DC Motor Controller;United States Patent;1984
[3] C.M.Liaw, R.Y.Shue, H.C.Chen and S.C.Chen;Development of a linear brushless DC motor drive with robust position control;lEE Proc.-Electr. Power Appl.. Vol. 148. No.2;March 2001
[4] ZHANGXiang-jun, CHENBo-shi;Influence of PWM Modes on Commutation Torque Ripples in Sensorless Brushless DC Motor Control System;Electrical Machines And Control;2001
[5] William J. Peterson; Dennis T.Faulkner;Motor Control For A Brushless DC Motor; United States Patent ;1982
[6]张晓红,赵显红,陈经林,王晔;直流无刷电机控制系统的研究;微计算机信息;2009
[7] 周文卫;直流PWM调速系统的研究;PE电力电子;2009
[8] 邹中华,吴陈,曾庆军;基于S3C2410的直流电机PWM调速系统;微计算机信息;2008
[9] 孙立军,孙雷等;无刷直流电机PWM调制方式研究;哈尔滨理工大学报;2006
[10] 杨燕,牟超峰;不同PWM调制模式下无传感器无刷直流电机调速系统仿真;微电机;2006
[11] 袁飞雄,黄声华,李朗如; 永磁无刷直流电机/01 调制方式研究; 微电机;2004
[12] 解恩,贺虎成,侯宏胜; 基于485总线的多无刷直流电机控制设计与实现;微电机;2008
[13] 李小龙,赵丽娟;用MSP430F149单片机实现的直流无刷电机控制器;重庆工学院学报;2008
[14] 金卫良,郑卫红,邵根富;基于xc866的无位置传感器无刷直流电机的控制系统设计;中国水运;2008
[15] 詹俊江;微机控制的直流PWM调速系统;广西轻工业;2007
[16] 汪玉成;直流电机PWM调速系统设计;商场现代化;2007
[17] 宋健,姜军生,赵文亮,孙学岩;基于单片机的直流电动机PWM 调速系统;农机化研究;2006
[18] 曹昕鸷,韩珏,陈隆道;高性价比无刷直流电机测速方法的研究;轻工机械;2006


