|
本文介绍了汽车半轴模锻生产线上下料搬运机器人1结构设计,首先介绍了汽车半轴新工艺,然后提出了汽车半轴模锻自动化生产线的总体方案,同时提出了搬运机器人1的结构设计总体方案,在该方案里进行了机械手手部结构的设计,其中包括了夹紧装置设计和计算,机械手整体的设计和驱动装置液压缸的选用,还有连接系统的连扳结构的整体设计,还有一些连接件的选择和校核。
本文运用CAD软件对机械手进行了结构设计然后运用Pro/E软件进行三维建模、装配以及运动仿真。
关键词 自动化生产 机械手 PRO/E 三维仿真
|
毕业设计说明书(论文)外文摘要
|
Title The Modeling of a Six Degree-of-Freedom Industrial
Robot for the Purpose of Efficient Path Planning
Abstract
This article describes the production line under the vehicle axle forging a design material handling robots.The paper first introduces the vehicle axle new technology, and then raises the overall scheme of automated production lines of the car axle forging. At the same time the paper also puts forward the overall program of a robot handling structural design , besides it conductes the structure of the robot hand design in the program.The program Includes a clamping device design and calculation, robot design and drives the overall selection of the hydraulic cylinder, and connects systems Lianban the overall design of the structure, there are some options and check connections.
This paper describes mechanical CAD software design and then hands out the use of PRO/E software for three-dimensional modeling, assembly and motion simulation.
Keywords Automatic production Handling robots PRO/E
Three-dimension Simulation technology
|
1 引言
自从20世纪60年代初人类创造了第一台工业机器人以后,机器人就显示出它极大的生命力,这就给工业机器人研究、开发、生产者带来巨大商机。然而机遇也意味着挑战,目前全球各大工业机器人供应商都已大力开拓中国市场,依靠自身优势,提高自主创新,寻求发展道路,是中国工业机器人生产企业在激烈市场竞争中需面对的问题[1]。由于在制造业工作环境恶劣,温度高,工人劳动强度大于是使用自动化生产,在自动化生产线中我们使用机器人生产。机器人的使用可以降低废品率和产品成本,降低了工人误操作带来的残次零件风险等,同时还提高了机床的利用率,带来了一系列十分明显的效益,例如减少人工用量、减少机床损耗、加快技术创新速度、提高企竞争力等。在制造业中,尤其是在汽车产业中,多采用自动化生产来提高效率及成本,因此工业机器人得到了广泛的应用。
1.1 汽车半轴新工艺
半轴是汽车传动系统的一个重要组成部分,半轴是用来将差速器半轴齿轮输出地动力传给驱动轮或轮边的减速器。李建在《汽车半轴锻件生产新工艺,锻压技术》写到:半轴是汽车轴类零件中承受扭矩最大的零件,因此要求材料有较好的抗弯强度,抗剪强度和良好的韧性。多年来,世界各国除了用各种计算方法外,还在材料的选择,毛坯成型,机械加工和热处理方面进行着不懈努力[2]。
传统的机械零件加工方法,工人工作环境差,工人劳动强度大、产品质量不稳定、生产成本高。而采用自动化生产线加工制造机械零件,可以将所有生产环节结合在一起。有些锻造设备在使用中出现的一些问题已经严重影响车轴的正常生产,因此在一些生产企业已经实现了锻造加工的自动化,特别是采用了搬运机器人实现多品种辊锻件的自动转换加工工位、自动上下料等工艺。工业机器人应用在锻造生产中,由于工作条件恶劣,温度高、锻件重、锻件产量大、数量多,工人的劳动强度很大。为了提高劳动生产率和加工精度稳定性,锻压工业在制造业领域中占有重要地位,特别是在汽车工业中起到越来越重要的作用。
金魏和辛洪兵在《汽车前轴精辊成形自动辊锻机组搬运机器人的新设计》一文中认为我国汽车行业中普遍采用辊锻的加工方法来生产连杆、曲轴、前轴等零部件。在车轴的锻造过程中,所有的直径尺寸和长度尺寸全部采用计算机对压机和操作机的参数设定来实现各部尺寸的控制[3]。在锻轴过程中,要求操作机钳口应始终保持与锻轴同心和随动,保证锻造的车轴不产生弯曲。原使用的操作机在锻轴过程中无上下动作,因此生产中产生的弯、偏轴数量较多。采用计算机监控的步进式加热系统,进行轴坯的锻造加热,彻底消除了原加热设备存在的轴坯加热不均,温度波动较大的问题。
半轴的摆碾新工艺代替过去的空气锤上的胎膜锻造,过去工艺落后,锻件精度低,工件表面质量差,废品率高。现在摆碾机的摆碾原理是利用一个绕中心迅速滚动的圆锥形上模对毛坯端面局部加压,使毛坯逐步成形的一种加工方法。由于摆动碾压变形是局部接触顺序加工,所以其接触面积和单位压力都比较小。摆碾的特点有:省力、省料、省能、生产率高,用于实现半机械化和机械化操作。
1.2 自动化生产线的相关发展
1.2.1 自动化生产线及其应用
在锻轴过程中由于工作条件恶劣,温度高、锻件重、锻件产量大、数量多,工人的劳动强度很大,所以采用自动化生产。樊明.魏泽鼎和韩提文写的《封焊机自动上料机械手设计》书中写到:生产线上装卸工件原由人工完成, 劳动强度大、生产效率低。为了提高生产线的工作效率,降低成本,使生产线发展成为柔性制造系统,适应现代自动化大生产,针对具体生产工艺,用机器人技术,设计用一台装卸机械手代替人工工作采用机械手代替人进行重复的取放件工作,自动上下料,减轻工人的劳动强度由于工业机器人带来的效益丰厚而且机械手设计巧妙,自由度少,实现机械手的规定动作较为理想,且成本较低,适于晶体行业推广使用[4]。在生产实际中,对改进生产线及提高生产率有重大的帮助。
周惠明在《关节型机械手结构创新设计》中说到:“驱动装置是带动机械手到达指定位置的动力源[5]。”李新和张文涛 在《新汶矿业集团工程公司可编程序控制器在机械手设计中的应用》提到目前使用的主要有4种驱动方式:液压驱动、气压驱动、直流电动机驱动和步进电动机驱动。手爪动作则采用全液压驱动,可以解决承受大负载及运动性能上的要求;结构上采用一些防护措施,也能使之适应工作点的高温,由于伸缩臂动作的位置精度要求较高,需使用专门的控制系统驱使手部搬运工件[6]。
手爪一般用法兰式机械接口与手腕相连接。刘涛在《装卸机械手设计研究侯沂》中描述到手腕部件设置于手爪和小臂之间,它的作用主要是在小臂运动的基础上进一步改变或调整手部在空间的姿态,以扩大机械手的动作范围,并使机械手变得更灵巧,适应性更强,而且徐灏在《 机械设计手册》中提到腕部件具有独立的自由度[7]。手腕运动有:绕轴的转动称为回转运动,绕Y轴的转动称为上下摆动(或俯仰);绕X轴转动称为左右摆动;有的甚至是沿Y轴(或X轴)的横向移动。王琳在《刮板输送机的优化设计》中说到:“一般手腕设有回转运动或再增加一个上下摆动即可满足工作要求,一些动作较简单的专用机械手,为简化结构,可以不设置腕部,而直接由臂部的运动本设计中,机身可作360度回转运动,其动力靠同步带来传递,同步带传动以其体积小, 重量轻,结构简单,传动比准确而保证了手臂运动的灵活性和定位的准确性[8]。”
蔡自兴在《机器人学机械手》中说到:“整机可分为机身、大臂、小臂( 含手腕) 、手部4个部分。机身与大臂、大臂与小臂、小臂与手腕有3 个旋转关节,以保证达到工作空间的任意位置,手腕中又有3个旋转关节: 腕转、腕曲、腕摆,以实现末端操作器的任意空间姿态。手腕的端部为一法兰,以连接末端操作器[9]。”其特点是: 结构比较简单,手腕运动范围大,且有较高的定位准。
随着科学技术的发展,机械手的应用范围将更加广泛,性能也将不断提高。从设计制造出的结果表明,机械手结构简单、控制性能良好、成本低,满足生产线的要求, 而且可将其运用于柔性制造系统,大大提高了设备利用率。
1.2.2 自动化生产线的发展前景
驱动技术的数字化和分散化;多传感器融合技术的实用化;工作环境设计的优化和作业的柔性化以及系统的网络化和智能化等方面[10]。机器人是最典型的机电一体化数字化装备,技术附加值很高,应用范围很广,作为先进制造业的支撑技术和信息化社会的新兴产业,将对未来生产和社会发展起着越来越重要的作用。国外专家预测,机器人产业是继汽车、计算机之后出现的一种新的大型高技术产业。目前全球各大工业机器人供应商都已大力开拓中国市场,依靠自身优势,提高自主创新,寻求发展道路,是中国工业机器人生产企业在激烈市场竞争中需面对的问题[11]。
1.3 研究内容及任务
本文研究的是汽车半轴模锻生产线上下料搬运机器人1结构设计。要求完成搬运机器人1手爪和传动驱动机构的机械装配图和主要零件图设计,及三维数字化建模。
本课题的目的是:完成设计的全过程,包括查阅文献资料、总体方案设计、详细设计、三维仿真建模、工程装配图和零部件图的绘制、撰写设计说明书等。锻炼学生独立工作能力、分析问题和解决问题能力,提高工程素养。
本课题的内容及任务:
(1) 查阅有关资料,掌握机器人和液压传动系统的原理及应用。
(2) 讨论和设计汽车半轴模锻生产线的总体方案。
(3) 设计和论证搬运机器人1的总体方案。
(4) 设计和计算汽车半轴模锻生产线搬运机器人1的手腕及手爪结构,和传动驱动机构。
(5) 运用PRO/E软件完成汽车半轴模锻生产线搬运机器人1手腕及手爪机构,和传动驱动机构的三维装配图和主要零件图设计。
(6) 运用PRO/E软件进行三维数字运动仿真。
(7) 完成搬运机器人1手腕及手爪机构的机械装配图和主要零件图绘制。
1.4 本章小结
本章先介绍汽车半轴新工艺,进而引出自动生产线,再提出本课题,在接着谈到汽车的部件生产制造(文中所举的例子为汽车半轴新工艺及自动化生产线)及目前生产方面的发展前景,以此引出课题,并在文中依次做了相关介绍。
2 总体方案
2.1 汽车半轴模锻生产线新工艺
汽车半轴在工作时由于要承受冲击力很大,这样就要求材料有足够的抗弯强度,抗剪强度和较好的韧性。过去的半轴锻件均是在空气锤上采用胎膜锻造,其工艺落后,锻件精度低,工件表面质量差,废品率高。改进后采用摆碾新工艺,摆碾机的摆碾原理是利用一个绕中心迅速滚动的圆锥形上模对胚料端面局部加压,使胚料逐步成形的一种加工方法,其特点有:省力、省料、省能、生产率高,用于实现半机械化和机械化操作,工作时无冲击,噪声小,劳动条件好[12]。
汽车半轴在成形工艺上必须经过轧制和锻造两次塑性变形过程。模锻是利用模具使胚料成形。压力机更适应精锻工艺,压力机模锻代替锤上模锻,更易于实现机械化,自动化连续生产[13]。模锻的特点是运动稳定性高,加工精度,安全性,可靠性高。汽车半轴模锻采用自动化生产实现自动上下料、自动转换加工工位等工艺。
2.2 汽车半轴模锻自动化生产线方案
本课题改进后的自动化生产线的工艺路线包括三个部分,第一部分是用200T压力机对胚料进行花键端的墩粗,压机上下压进行模锻使花键端成形。而此时胚料是由上下料机器人1由水平转为竖直放入压机,锻压后,保持垂直平拉出锻压机,再由垂直方向转为水平方向,放到传送链。第二部分是用同上一样的第二台压机对胚料另一端进行法兰盘端预成型,压机合模之后进行模锻过程使法兰盘预成型。此时由搬运机器人2辅助完成同上的动作。第三部分是摆碾机对法兰盘端进行摆碾,摆碾技术同轴度比较高,此时由机器人3辅助完成摆碾过程一系列动作。
整个自动化生产线中还包括了三台翻转机构和自动传送链传送胚料,这种结构能够使生产线各设备联系起来。在生产线中主要设备中还有三台中频感应加热炉给胚料两端加热。在生产线改进后的方案中整个系统由液压驱动。根据动力源的不同,工业机械手的驱动机构大致可分为液压、气动、电动等。本课题采用液压驱动,其优点是刚性好,可以在很大范围内实现无级调速,体积小,润滑性能好,寿命长等。控制系统则采用可编程PLC控制自动化生产线。其总体结构框图如图2.1所示。
图2.1 总体结构框图
在整个自动化生产线中所有的数据全部通过计算机来完成管理、输出和存储。
2.3 搬运机器人1的总体方案
搬运机器人1由机座、手臂、连板以及两只手爪组成。机座是固定的,利用回转缸连接机座和手臂,通过伸缩缸连接手臂和连板,连板连接两只手爪。
机器人1有两个自由度,即一个转动副和一个移动副。手臂回转副实现胚料由水平方向到垂直方向,再由垂直方向到水平方向的动作,连板移动副实现胚料的上升和下降、伸出和缩回。
搬运机器人1要完成花键端得成型和法兰盘端得预成型。搬运机器人1抓取胚料后,手爪部分进行夹紧,由水平方向转动到垂直方向,并保持垂直方向水平送入锻压机中进行花键成型。锻压完成后,将胚料保持垂直方向水平推出,再由垂直方向转动到水平方向,将胚料送到翻转机构上,由翻转机构送入生产链上。
胚料落到另一台机器人上,手爪部分进行夹紧,由水平方向转动到垂直方向,此次转动的方向应该与上一台机器人的转动方向相反,并保持垂直方向水平推入锻压机中进行摆碾预成型。成型后,将胚料保持水平推出,再由垂直方向转动到水平方向,此时,先将沿垂直方向上升一端距离,到达的位置一定要比接下来的翻转机构高,然后再沿垂直方向下降,这样可使胚料落入翻转机构中,再由翻转机构送到生产链上。
搬运机器人1的工艺路线为:






 毛坯储藏室取料夹紧 夹紧棒料转90
毛坯储藏室取料夹紧 夹紧棒料转90 伸缩手臂水平伸出松开 锻压机锻压 手臂缩回 夹紧棒料转90 手臂上升 松开棒料 手臂下降 将棒料放入翻转机构,然后回归原位准备下一次动作。
伸缩手臂水平伸出松开 锻压机锻压 手臂缩回 夹紧棒料转90 手臂上升 松开棒料 手臂下降 将棒料放入翻转机构,然后回归原位准备下一次动作。
2.3.1 搬运机器人1的初步设计方案如下
机器人1的总体结构简图如图2.2所示。
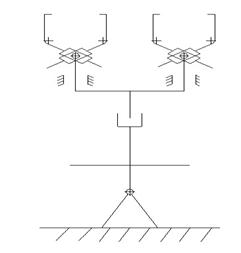
图2.2 机器人1的总体结构简图
(1) 机器人1的手爪与手腕的设计
本课题的机械类手爪靠摩擦力夹持工件。采用二指夹持器的结构设计。指端的形状通常有两类:V型指和平面指,本课题采用V型指用于夹持圆柱形工件。指面的形状有光滑指面,齿形指面和柔性指面,本课题采用齿形指面。由于所夹棒料较长,为使其抓取更为稳定,故采用双爪抓持棒料,且分别用两个液压缸驱动。工业机器人末端操作器是多种多样的,大致可分为以下几类:夹钳式取料手,吸附式取料手,专用操作器及转换器,仿生多指灵巧手,本设计中采用其夹钳式取料手[14]。
(2) 驱动机构的选择
驱动机构是工业机械手的重要组成部分,工业机械手的性能价格比在很大程度上取决于驱动方案及其装置。根据动力源的不同,工业机械手的驱动机构大致可分为液压、气动、电动等。液压传动的特点:结构简单紧凑,刚性好,可以在很大范围内实现无级调速,体积小,润滑性能好,寿命长等。液压驱动器是可以把液压能量变换成直线运动,旋转运动或摆动运动的机械能,从而带动机械的装置[15]。同时该机械手机构较为简单,只需实现手爪的张合,仅为一个自由度。一个锻压机械手要从高温炉内取出红热的锻件必须保证手爪的开合,驱动在高温环境中均能正常工作。机器人1的手臂采用液压驱动,支撑腕部和手部,机座往往与机身做成一体。
(3) 传动机构的选择
传动机构包括齿轮齿条式传动,连杆杠杆式传动等,本文选择连杆杠杆式传动。
图2.3为连杆杠杆式机械手爪示意图。
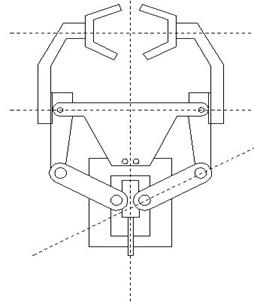
图2.3 连杆杠杆式机械手爪示意图
(4) 用PRO/E软件对初步设计好的机器人手腕及手爪画三维图,以便可以清楚地看到实体模型。
(5) 之后,运用Pro/E软件对初步设计好的机器人手腕及手爪进行三维实体建模,以便直观地了解机器人手腕及手爪的结构是否合理,动作轨迹是否有干涉等,对手腕及手爪结构作进一步的优化设计。
(6) 对三维造型进行装配,完成仿真运动。
(7) 最后对机器人机械手材料的选择,由于所夹工件的重量在30kg左右,故需对设计好的机械手进行力的分析与校核,使其受力在安全范围内。验证设计是否正确,进一步改正设计。
2.4 本章小结
由于采用自动化生产线可以节省时间,减少工人强度,提高生产效率,同时也缩短了机器人开发及设计周期,因此在设计是要节省材料,降低成本,尽量使结构简单,增加机器寿命。
3 机械手手部结构的设计
本毕业设计题目是汽车半轴模锻生产线上下料搬运机器人1结构设计。要求完成搬运机器人1手腕及手爪结构和传动驱动机构的机械装配图和主要零件图设计。
3.1 机械手设计的基本要求
(1) 应具有刚度高,重量轻;
(2) 应具有适当的夹紧力和驱动力;
(3) 手指应具有一定的开闭范围;
(4) 要求结构紧凑,效率高;
(5) 要运行平稳;
(6) 应考虑通用性和特殊要求;
3.1.1 设计参数及要求
(1) 胚料为Φ48mm~Φ55mm,长1350mm~1590mm的圆钢棒料;
(2) 采用手指式夹持器,执行动作为抓紧―放松;
(3) 重量小于30Kg,材质为45#钢;
(4) 夹持器靠法兰联接在手臂上,由液压缸提供动力;
(5) 生产节拍为70s±10s;
(6) 搬运机器人1上下料动作要求:胚料一端加热后,由水平方向转为垂直方向,并保持垂直平推进入锻压机;锻压后,保持垂直平拉出锻压机,再由垂直方向转为水平方向,放到传送链。
3.2 手部结构设计
手爪一般用法兰式机械接口与手腕相连接。机器人的手腕是连接末端操作器和手臂的部件,它的作用是调节或改变工件的方位,因而具有独立的自由度。本课题的机械类手爪靠摩擦力夹持工件。手指的张开和闭合实现松开和夹紧物件。本课题采用两个手指的。V型指夹持圆柱形工件,其特点是夹持平稳可靠,夹持误差小。采用齿形指面。手爪的材料对机器人的影响也很大,夹持式手指一般选用碳素钢或合金钢结在腐蚀气体环境下工作手指,可镀铬或进行处理.此手爪采用连杆杠杆型,产生夹紧力的驱动源为液压传动。液压驱动器是可以把液压能量变换成直线运动,旋转运动或摆动运动的机械能,从而带动机械做工的装置。
3.3 夹紧装置的设计
3.3.1 夹紧力的计算
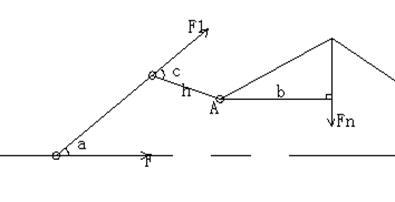
图3.1 手部受力分析图
根据图3.1手部受力分析图由力矩平衡得 知
知
对A点求转矩 
又 
得 
式中  为驱动力
为驱动力 与手爪连板之间的夹角(暂取50o)
与手爪连板之间的夹角(暂取50o)
 为手爪抓持中心到旋转中心的距离(暂取35mm)
为手爪抓持中心到旋转中心的距离(暂取35mm)
 为力
为力 与连杆
与连杆 的夹角(暂取80o)
的夹角(暂取80o)
手指加在工件上的夹紧力是设计手部的主要依据,必须对其大小、方向、作用点进行分析、计算。一般来说,加紧力必须克服工件的重力所产生的静载荷(惯性以使工件保持可靠的加紧状态。
手指对工件的夹紧力可按下列公式计算:


